
今天是4月19日。
北京亦庄,一台两腿机器人在赛道上奔跑,工程师坐着电瓶车追在后面——跑着跑着,就跑不见了。
这就是2026年的现实。
7.51 vs 7.28:一个微小的数字,一条真实的红线
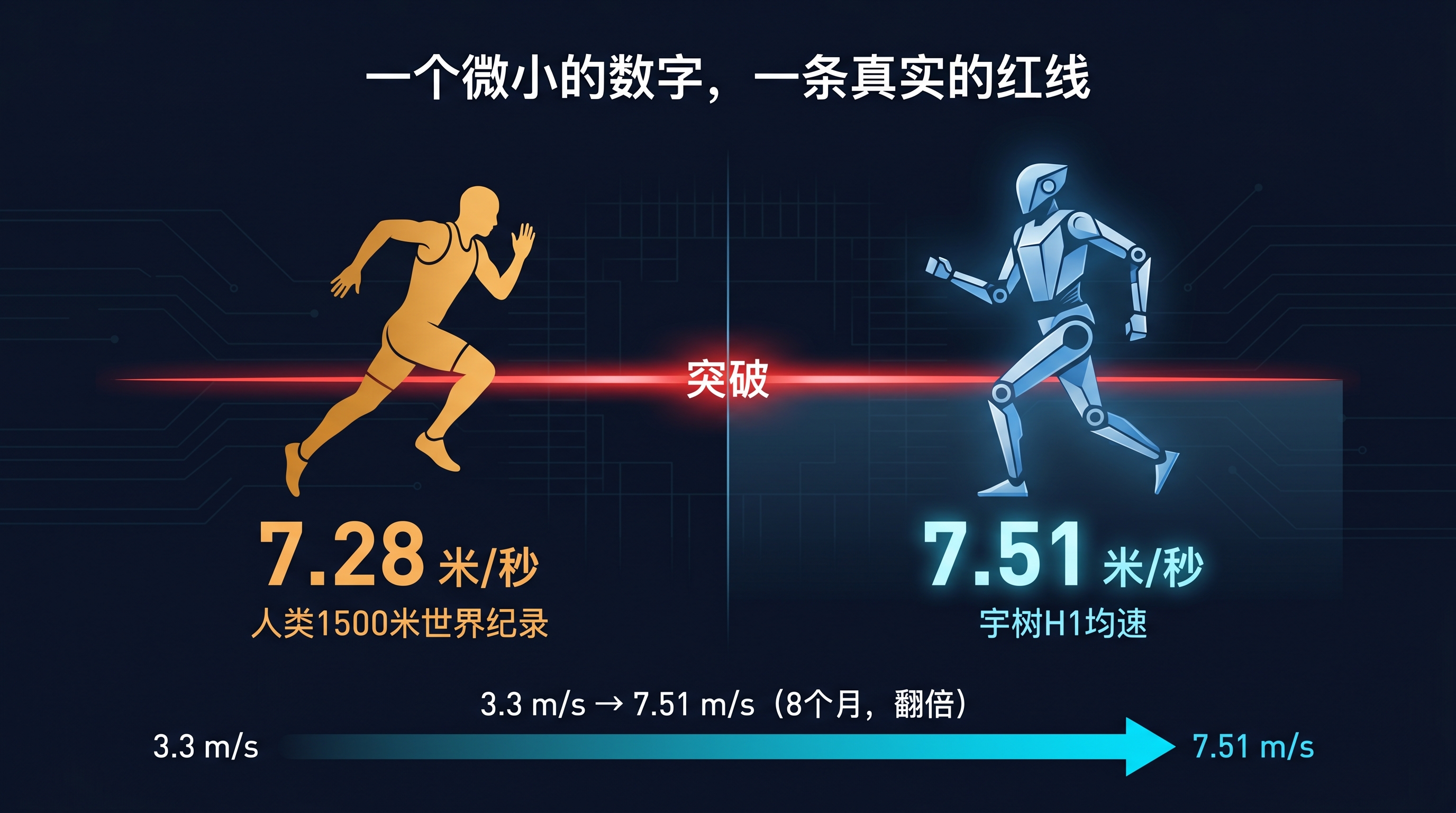
人类1500米世界纪录,由挪威选手雅各布·英格布里格森在2024年巴黎奥运会跑出:3分26秒。
换算成速度:7.28米/秒。
这是人类数十年训练、选拔、药物管控之后,能跑出的最快均速。世界上只有一个人做到过。
今天,在2026北京亦庄人形机器人半马排位赛中,宇树H1全程平均速度:7.51米/秒。
差距是0.23米/秒。以1500米计算,大约快了5秒。
不是机器人跑完了正式的1500米赛程、破了记录——赛制不同,这是机器人和人类共跑的半程马拉松。但数字已经说明了一件事:在速度这个维度上,机器人已经越过了人类的极限。
去年8月,宇树H1在世界人形机器人运动会上的均速是3.3米/秒。
八个月后,7.51。
翻了一倍多。
今天的赛场:三百台机器人,与人同跑

今天的亦庄半马,是一场奇特的比赛。
12000名人类选手和300余台机器人共用同一条赛道。起跑的枪声一响,两条腿的人和两条腿的机器人,跑向同一条终点线。
参赛机器人超过一百支队伍,比去年增长近五倍。其中自主导航赛队接近四成——也就是说,这些机器人不靠遥控,靠自己的眼睛和算法决定每一步怎么落脚。
宇树H1就是其中一台。
H1没有遥控器,也没有预先编程的行进路线。它搭载超过180个传感器,实时识别路面状况,动态规避障碍,所有决策都在机器自身内部完成。工程师唯一能做的,是坐在电瓶车上跟着它——因为靠腿已经追不上了。
这台机器人去年就已经在世界人形机器人运动会上拿了三项冠军:400米、4×100米接力、1500米。
今年它来跑半马。内部测试成绩:50分钟出头。人类平均完赛时间:约2小时。
宇树是怎么做到的
速度的背后,是一个持续压缩的工程时间表。
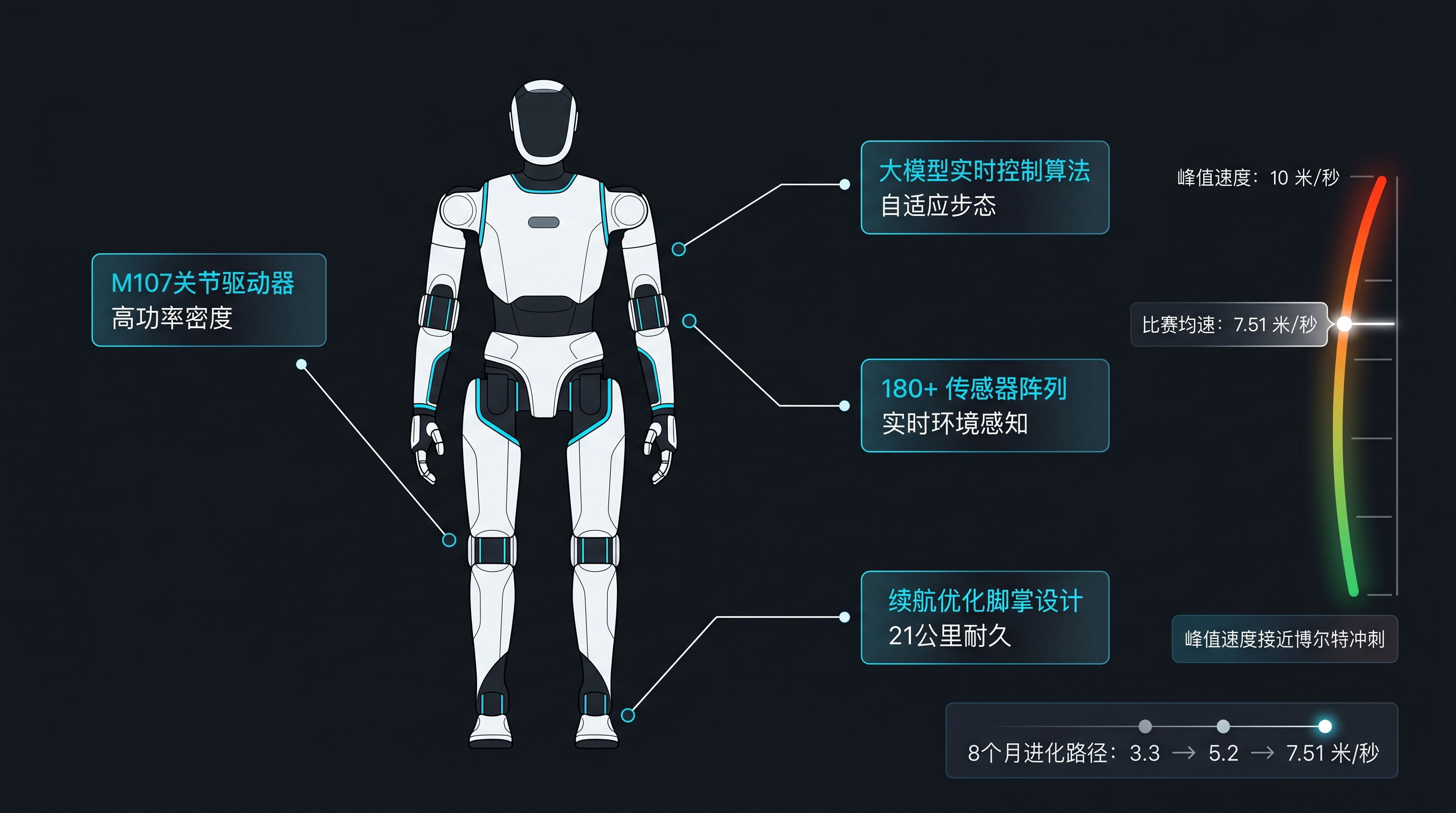
关节驱动:H1采用M107型关节驱动器,功率密度在当前人形机器人中处于前列。高功率密度意味着同样体积能输出更大扭矩,是跑步能力的硬件基础。
算法架构:H1搭载大模型算法做实时控制决策,而不是传统的规则式运动控制。面对弯道、坡面、地面材质变化,它可以自适应调整步态,而不是崩掉。
速度上限:极限冲刺阶段,H1峰值速度达到10米/秒——接近博尔特100米冲刺的最高速度(10.44米/秒)。这不是巡航速度,但已经能告诉你这台机器的上限在哪里。
续航设计:半马是21公里,比400米长了50倍。宇树为本次参赛版本专门调整了续航设计和脚掌结构,目的是让高速度能维持足够长的时间。
八个月,从3.3到7.51。按照这个速度,两年后这台机器能跑多快?
这条线,意味着什么
我们通常把AI威胁理解成"写代码写得更快"“翻译做得更好”。那些都是信息处理的范畴——看不见、摸不着,很难产生切身感受。
速度不一样。速度是具体的。你能感受到它。
人类跑步的极限,是几百年来人类认知自身的一部分。奥运会1500米的纪录,是全世界最好的运动员,经过几十年的训练和竞争,一点一点压出来的边界。
今天,一台机器的均速超过了那条线。
这不是末日预言。宇树H1不会抢你的工作,也不会去参加奥运会(赛制不允许)。但它告诉我们一件事:我们曾经认为"只有人类能做到"的事情,边界正在快速收缩。
而且,收缩的速度比预想的快。
2024年,业内很多人认为机器人超越人类运动极限要到2030年。
今天是2026年。
接下来会发生什么
全程马拉松:半马结束后,下一个目标已经是42公里。机器人的续航和稳定性问题会被放大十倍,但工程问题终究是工程问题,可以被解决。
工厂与仓库:高速移动能力直接提升物流和制造场景的效率。7.51米/秒的均速在工厂地面上意味着什么——你可以自己算一下。
服务场景:高德在同一天的半马赛场上展示了另一类机器人:陪伴视障人士在开放道路上导航的四足机器人。速度不是唯一的维度,自主性才是真正的入口。
今天,我们记录的是一个速度数字。
但真正值得记住的,是它背后的斜率。从3.3到7.51,八个月,翻倍。这条曲线如果继续,你自己可以推演接下来几年会发生什么。
今天亦庄赛场上有一幕让很多观众愣住了:
一台机器人跑过来,停下来,向旁边的人类选手伸出了手,想握手。
人类选手愣了一秒,没有回应,继续跑。
机器人收回手,也继续跑。
没有人说这意味着什么。但每个看到这一幕的人,都停顿了一下。

具身智能:为什么这件事比"AI写代码"更重要
我们谈了很多年的 AI,谈的大多是"软"的那种——语言模型、图像生成、代码助手。这些 AI 活在屏幕里,活在服务器上,活在你的对话窗口里。
具身智能(Embodied Intelligence)不一样。它活在物理世界里。
宇树H1今天跑过的那条赛道,是真实的柏油路面,有风,有坡度,有其他选手的干扰,有赛道上随机出现的障碍。它感知的是真实的物理信号,它做出的每一步决策都要立刻落地——字面意义上的落地,踩在地上。
这是具身智能的核心挑战,也是它的核心价值:不是在虚拟环境里"想",而是在真实世界里"做"。
当一台机器人能够在开放赛道上以超越人类极限的速度自主奔跑,它证明的不只是速度。它证明的是:感知-决策-执行的完整闭环,已经可以在非结构化的真实世界中高速运转。
这条能力曲线,才是今天最值得关注的事。
从仓库里的搬运机器人,到赛道上的竞速机器人,到街道上陪伴视障人士的导航机器人——具身智能正在从"实验室能做到"走向"真实世界能用上"。这个跨越,比任何一次大模型参数量的翻倍,都更接近我们每一个人的日常生活。